|
Model
The simulation is data-driven. The terrain is generated using real elevation
data and real landcover data. The landcover data is used to color the terrain
according to vegetation type and to populate it with trees. The water
surface is colored according to depth from real channel data.
The movement of the vessel is computed using a physics-based model. A tow
is very difficult to steer because once it gets moving it has a lot of
inertia.
|
 |
|
Rendering
I am responsible for the main simulation component of this project. I am
implementing the 3D engine using IRIS Performer.
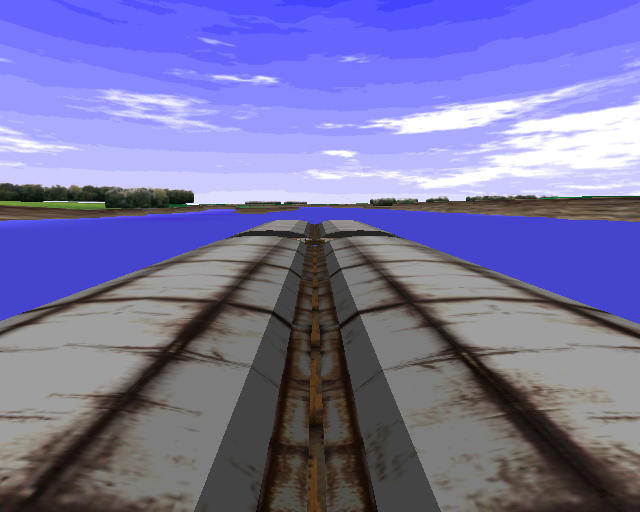
The user can switch between several different camera views. This is the first-person
view from the pilot house. Much like in real life, the view from the pilot
house is quite restricted. Most users prefer one of the birds-eye views.
The tugboat model was created by Dave "Diode" Hayashida. The barge model
was the combined work of Dave and Jon Stuyvesant.
|
 |
|
Flow Display
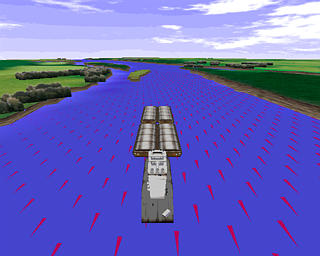
The user can toggle the display of the flow field. The flow field is
computed using real river data and a scientific model of river flow.
Understanding the river currents is essential to piloting the tow successfully.
Bill Brown is responsible for most of the data preparation for this project.
Mingshi is responsible for the flow computation.
|
 |
|
Sound
A big part of the simulator experience is the sound. Camille Goudeseune created a procedural
engine sound using vss that can be modified dynamically based on the throttle position. The sound
shakes the whole casing and can be heard across the gallery. It definitely helps attract visitors to the exhibit. : )
Alan Craig composed the theme music.
|
|
|
Digital Camera Pics
Albert and I in front of the prototype. The casing
for the exhibit was designed by the museum. It is very nice and the look
matches the real tugboat that is on display just outside those windows in
the background.
The primary display for the exhibit is a 50" Pioneer plasma screen.
The primary machine driving the simulation is a SGI Octane MXE on loan from
SGI.
|
 |
|
Console and Controllers
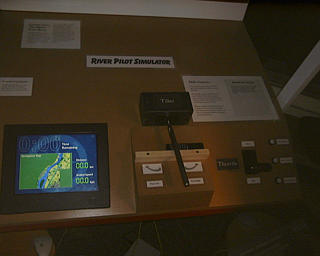
Albert is responsible for the console and controllers. The console displays
a map-view. It shows the current location, current heading, path traveled, current
speed, distance traveled, and time remaining. The console "look" was designed
by Thanh Tran. The controllers for the tiller
and throttle are modified Happ arcade controls.
Albert's console is a separate application that runs on a Linux box. It
communicates with the SGI Octane over a local network.
|
 |
|
Observation
After we installed the exhibit, we stayed for opening day and were able
to observe visitors interacting with the exhibit and each other. The overall
reaction to the simulator was very positive and most visitors picked up on
the core concepts very quickly. In this picture, Doug Johnston, the
technical lead for the RiverWeb project, is observing a father and son
interacting with the exhibit.
|
 |